دوره آموزشی

دوبله زبان فارسی
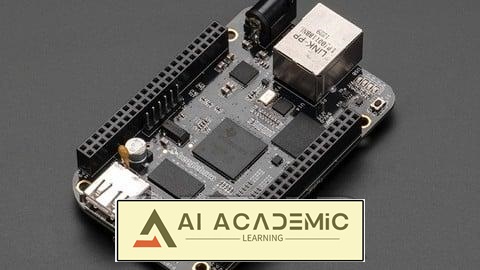
آموزش گام به گام Embedded Linux با استفاده از Beaglebone Black
✅ سرفصل و جزئیات آموزش
آنچه یاد خواهید گرفت:
- درک ROM – فرآیند بوت Uboot-Kernel در سیستمهای Linux-ARM و تست
- تجزیه و تحلیل گام به گام کرنل و Bootloaders و تست آنها بر روی سختافزار Beaglebone
- توضیح و تست U-Boot ،MLO ،SPL
- درک سیستمهای فرعی مختلف SOC AM335x مانند GPIOها، I2C ،MMC، حالتهای بوت و غیره
- درک دستگاههای پلتفرم و نحوهی کارکرد آنها
- درک فایلهای پیکربندی ARM-board
- درخت دستگاه Linux
- درک حالتهای بوت مختلف AM335x
- بهروزرسانی eMMC OS و بوت کردن OS جدید Debian
- Serial booting (UART)
- TFTP booting
- NFS booting
- شبکهسازی Beaglebone
- تحلیل و تست Busybox
- پیکربندی و استفاده از Buildroot در Beabone
- نوشتن uEnv dot txt از ابتدا و تست
- استفاده از ابزارهای I2C بر روی BBB
- پروژههای رابطدهی سختافزاری و توسعه اپلیکیشن های 'C' با استفاده از Eclipse IDE
- برنامهنویسی GPIO
- ایجاد رابط LEDهای خارجی، نمایشگرهای 7Segment و توسعه کد
- ایجاد رابط LCD و پروژههای مربوطه
- ایجاد رابط حسگر MPU6050 و حسگر شیب
- برنامهنویسی EEPROM
پیش نیازهای دوره
- دانش پایهای از فرمان های لینوکس ممکن است نیاز باشد.
- دانش پایهای از برنامهنویسی 'C' ممکن است نیاز باشد اما الزامی نیست.
توضیحات دوره
این دوره برای مبتدیان تا سطح پیشرفته طراحی شده است.
این دوره به یادگیری سیستمهای Embedded Linux و اجرای Linux embeded و کامپوننت های مختلف آن بر روی سختافزار Beaglebone کمک میکند.
این دوره برای چه کسانی مناسب است؟
- دانشجویانی که به دنبال کاوش در دنیای Linux بر روی ARM هستند.
- حرفهایها یا دانشجویانی که بر روی سیستمهای Linux embeded کار میکنند.
آموزش گام به گام Embedded Linux با استفاده از Beaglebone Black
-
مرور کلی 08:14
-
دانلود متریال دوره 03:24
-
مقدمهای بر BeagleBone Black(BBB) Board 04:34
-
استفاده از Minicom 10:12
-
استفاده از Teraterm و Putty 06:37
-
آغاز کار با BBB و تنظیمات اولیه 04:41
-
رابط وب BBB 10:18
-
تست - 1 None
-
نصب “Ubuntu-16” بر روی ماشین مجازی - بخش 1 08:47
-
نصب “Ubuntu-16” بر روی ماشین مجازی - بخش 2 07:21
-
ارتباط با BBB 09:40
-
مروری بر بلوکهای تابعی AM335x - بخش 1 17:56
-
مروری بر بلوکهای تابعی AM335x - بخش 2 09:51
-
تست - 2 None
-
برای بوت موفق لینوکس بر روی BBB به چه چیزهایی نیاز داریم؟ 04:53
-
بحث در مورد توالی بوت لینوکس BBB: بررسی ROM و SPL 09:26
-
بحث در مورد توالی بوت لینوکس BBB - جاب MLO/SPL 06:09
-
بوت کردن RBL و MLO بر روی BBB 04:56
-
تست تصویر MLO بر روی BBB 12:11
-
تست تصویر U-boot بر روی BBB 02:50
-
بحث در مورد توالی بوت لینوکس BBB-uboot 17:46
-
دیکودینگ هدر U-boot از uImage به صورت دستی 08:54
-
بحث در مورد توالی بوت لینوکس - Boot strap loader - بخش 1 09:37
-
بحث در مورد توالی بوت لینوکس - Boot strap loader - بخش 2 09:20
-
بحث در مورد توالی بوت لینوکس - ورود کرنل 04:39
-
بحث در مورد توالی بوت لینوکس - آغاز 'INIT' 09:04
-
تست - 3 None
-
بوت eMMC - جزئیات کامل 05:11
-
بهروزرسانی eMMC - دانلود آخرین تصویر OS 17:41
-
فعالسازی اینترنت بر روی BBB 14:37
-
بوت کردن BBB از طریق کارت SD با آخرین تصاویر 05:31
-
ورود به BBB 01:32
-
چرا درخت دستگاه لینوکس معرفی شده است؟ 09:27
-
تست - 4 None
-
نوشتن فایل uEnv.txt از ابتدا - بخش 1 10:45
-
نوشتن فایل uEnv.txt از ابتدا - بخش 2 08:36
-
نوشتن فایل uEnv.txt از ابتدا - بخش 3 11:41
-
نوشتن فایل uEnv.txt از ابتدا - بخش 4 04:52
-
نوشتن فایل uEnv.txt از ابتدا - بخش 5 10:46
-
تست - 5 None
-
بوت سریال - جزئیات کامل 12:53
-
تست بوت سریال - بخش 1 09:19
-
تست بوت سریال - بخش 2 09:31
-
تست - 6 None
-
بوت TFTP - جزئیات کامل 04:58
-
تست بوت TFTP بر روی BBB 15:25
-
درک درخت منبع U-boot 08:28
-
نصب زنجیره ابزار کراس 06:41
-
پیکربندی و تولید تصویرهای SP L،MLO ،U-boot - بخش 1 02:28
-
پیکربندی و تولید تصویرهای SPL ،MLO ،U-boot - بخش 2 08:42
-
سازماندهی کد مرتبط با معماری ARM 10:36
-
سازماندهی فایلهای پیکربندی بورد ARM 15:20
-
سازماندهی کد درایور مختص SOC 04:57
-
پیکربندی و تولید تصویر لینوکس 17:38
-
تست - 7 None
-
مقدمهای بر Busybox 05:11
-
Busybox compilation 11:04
-
نصب ماژولهای کرنل 09:50
-
تست تصاویر بوت و busybox بر روی BBB - بخش 1 13:38
-
تست تصاویر بوت و busybox بر روی BBB - بخش 2 11:18
-
درک راهاندازی busybox و اسکریپت rcS 04:17
-
ادغام اسکریپتهای rcS (شروع) 11:52
-
فعالسازی اترنت از طریق USB با ادغام درایور 09:48
-
بارگذاری خودکار درایور در زمان راهاندازی سیستم 09:31
-
تست - 8 None
-
مقدمه Buildroot 04:33
-
بررسی دایرکتوریهای buildroot و فرمان های Build 06:53
-
پیکربندی و ساخت Buildroot - بخش 1 06:35
-
پیکربندی و ساخت Buildroot - بخش 2 06:48
-
تست RFS buildroot و پشتیبانی SSH بر روی BBB 08:14
-
پیکربندیهای Buildroot Linux و U-boot 11:03
-
تولید و تست تصویر Buildroot linux-uboot بر روی BBB 06:40
-
نصب Eclipse + زنجیره ابزار کراس + ابزارهای ساخت 08:28
-
ایجاد پروژه Eclipse و تنظیمات ساخت 05:23
-
نصب Remote System Explorer و تست اپلیکیشن 09:27
-
ایمپورت کردن پروژههای Eclipse 05:18
-
جزئیات AM335x GPIO subsystem و هدر توسعه - بخش 1 14:49
-
جزئیات AM335x GPIO subsystem و هدر توسعه - بخش 2 06:13
-
BBB GPIOs و رجیسترهای پیکربندی Mode 08:18
-
بررسی جزئیات پین با استفاده از ورودیهای SYSFS - بخش 1 11:57
-
بررسی جزئیات پین با استفاده از ورودیهای SYSFS - بخش 2 06:27
-
کنترل USER LEDs با استفاده از ورودیهای SYSFS - بخش 1 11:00
-
کنترل USER LEDs با استفاده از ورودیهای SYSFS - بخش 2 03:50
-
کنترل USER LEDs با استفاده از اپلیکیشن ‘C’ - بخش 1 13:39
-
کنترل USER LEDsبا استفاده از اپلیکیشن ‘C’ - بخش 2 06:10
-
تست - 9 None
-
ایجاد رابط LED خارجی - بخش 1 08:57
-
ایجاد رابط LED خارجی - بخش 2 13:09
-
مبانی نمایشگر 7Segment و ایجاد رابط 08:58
-
ادامه مبانی نمایشگر 7Segment و ایجاد رابط 08:26
-
پیادهسازی شمارنده بالا و پایین نمایشگر 7Segment - بخش 1 16:50
-
پیادهسازی شمارنده بالا و پایین نمایشگر 7Segment - بخش 2 06:31
-
تست - 10 None
-
پیادهسازی شمارنده LED هفتگانه 4 رقمی 11:20
-
چرا شتابسنجها استفاده میشوند؟ 08:31
-
چرا حسگرهای ژیروسکوپی استفاده میشوند؟ 06:57
-
مقدمهای بر MPU6050 05:11
-
درک محدوده مقیاس کامل MPU6050 ACC 07:57
-
تبدیل مقدار خام Acc به مقادیر g 02:11
-
درک محدوده مقیاس کامل MPU6050 Gyro 04:09
-
جزئیات برد شکسته MPU6050 04:07
-
انتخاب پینهای BBB I2C برای ایجاد رابط حسگر 07:51
-
توضیح کد منبع خواندن خام MPU6050 - بخش 1 18:36
-
توضیح کد منبع خواندن خام MPU6050 - بخش 2 10:31
-
تست اپلیکیشن خواندن خام MPU6050 بر روی BBB 08:54
-
اندازهگیری زاویه شیب شیء - بخش 1 09:24
-
اندازهگیری زاویه شیب شیء - بخش 2 08:02
-
مقدمهای بر LCD 02:28
-
جزئیات پین 16x2 LCD 12:28
-
جزئیات داخلی کنترلر HD44780 LCD 04:23
-
درک DDRAM ،CGRAM ،CGROM 09:29
-
درک مجموعه فرمان LCD - بخش 1 17:16
-
درک مجموعه فرمان LCD - بخش 2 12:47
-
اتصال BBB و LCD 03:50
مشخصات آموزش
آموزش گام به گام Embedded Linux با استفاده از Beaglebone Black
- تاریخ به روز رسانی: 1404/06/14
- سطح دوره:همه سطوح
- تعداد درس:114
- مدت زمان :15:48:58
- حجم :10.94GB
- زبان:دوبله زبان فارسی
- دوره آموزشی:AI Academy
آموزش های مرتبط
The Great Courses
4,535,500
907,100 تومان
- زمان: 11:29:01
- تعداد درس: 27
-
سطح دوره:
-
زبان: دوبله فارسی
The Great Courses
5,200,500
1,040,100 تومان
- زمان: 13:10:31
- تعداد درس: 68
-
سطح دوره:
-
زبان: دوبله فارسی
The Great Courses
1,797,000
359,400 تومان
- زمان: 04:33:45
- تعداد درس: 9
-
سطح دوره:
-
زبان: دوبله فارسی
The Great Courses
2,646,500
529,300 تومان
- زمان: 06:42:29
- تعداد درس: 24
-
سطح دوره:
-
زبان: دوبله فارسی

The Great Courses
4,417,000
883,400 تومان
- زمان: 11:11:40
- تعداد درس: 14
-
سطح دوره:
-
زبان: دوبله فارسی

-
سطح دوره:
-
زبان: دوبله فارسی

-
سطح دوره:
-
زبان: دوبله فارسی
The Great Courses
490,000
98,000 تومان
- زمان: 1:01:39
- تعداد درس: 13
-
سطح دوره:
-
زبان: دوبله فارسی

The Great Courses
5,233,500
1,046,700 تومان
- زمان: 13:15:58
- تعداد درس: 86
-
سطح دوره:
-
زبان: دوبله فارسی