
دینامیک خودرو - مثالهای متلب و سیمولینک
✅ سرفصل و جزئیات آموزش
آنچه یاد خواهید گرفت:
- کسب درک اولیهای از ویژگیهای نیروی چرخش تایرهای پنوماتیک
- توانایی تحلیل حرکات صفحهای وسایل نقلیه جادهای با استفاده از مدل دوچرخه
- گسترش استفاده از مدل دوچرخه به تحلیل هندلینگ وسایل نقلیه کمرشکن
- کسب بینش از ایدههای اولیه وسایل نقلیه چهار چرخ و استراتژیهای کنترل کلاسیک
- آشنایی با مدلهای مختلف مرتبه بالای وسایل نقلیه که برای تحلیل هندلینگ استفاده میشوند.
- درک حرکات اولیه در هدایت خودرو
- توانایی مدلسازی خودرو برای مطالعات هدایت خودرو و سطوح جاده به عنوان ورودی به این مدلها
- دریافت پاسخ مدلهای خودرو به ورودیهای جاده و ارزیابی کیفیت سواری
- آشنایی با طراحی و بهینهسازی سیستمهای تعلیق غیرفعال و فعال
پیشنیازهای دوره
- درک اولیهای از دینامیک داشته باشید.
- تجربه اولیه در متلب
توضیحات دوره
در این دوره، درباره معادلات اصلی یک وسیله نقلیه در هنگام چرخش و راحتی سواری آن خواهیم آموخت. شما با منطقهای اصلی در هندلینگ، مانند کمچرخشی و زیادچرخشی آشنا خواهید شد. در این راستا قادر خواهید بود نتایج شبیهسازی شده را در متلب تفسیر کنید.
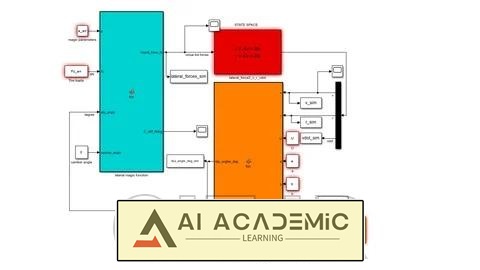
برای مدلسازی معادلات دینامیک خودرو، برخی از جبرهای دیفرانسیلی پایه لازم است و روش فضای حالت برای مدلسازی سیستمهای خودرو معرفی میشود. مشتقات معادلات زیربنایی به تفصیل توضیح داده نمیشوند، اما در نمودارها نشان داده شده و بر نکات اصلی تأکید میشود. از این منظر، این دوره یک دوره مکمل است که بر شبیهسازی و تحلیل تمرکز دارد. کتابهای عالی برای مطالعه دقیق دینامیک خودرو وجود دارد.
شما برخی از مهارتها و ترفندهای فنی را یاد خواهید گرفت که چگونه ورودیهای اولیه هدایت خودرو و پروفیلهای جادهای را ایجاد کنید و بهترین روش برای نوشتن توابع متلب برای تولید فضای حالت مدل وسیله نقلیه را خواهید آموخت.
از آنجایی که شما چارچوب نظری بین معادلات را مطالعه خواهید کرد، قادر خواهید بود مزایا و معایب مدلهای مختلف و نحوه و زمان کاربرد آنها را درک کنید و همچنین بدانید که چگونه به حل مسائل بپردازید.
علاوه بر این، شما روشهای کنترل بنیادی برای سیستمهای فضای حالت در مورد وسایل نقلیه، بازخورد حالت و استراتژیهای LQR را یاد خواهید گرفت.
این دوره شامل تکالیف بوده و برخی از آنها ممکن است چالشبرانگیز باشند. موضوع تکراری در تکالیف وجود دارد که به زودی با این رویکرد مدلسازی آشنا میشوید تا پروژههای خود را پیش ببرید.
این دوره برای چه کسانی مناسب است؟
- کسانی که میخواهند دانش شبیهسازی و کنترل وسایل نقلیه خود را بهبود بخشند.
دینامیک خودرو - مثالهای متلب و سیمولینک
-
مقدمه 01:29
-
فصل 1 - شتاب جانبی 01:06
-
فصل 1 - انتقال بار 02:36
-
فصل 1 - تایرها 02:49
-
آزمون 1 None
-
فصل 1 - ویژگیهای نیروی در چرخش 10:02
-
فصل 1 - پارامترهای ثانویه 06:20
-
آزمون 2 None
-
فصل 1 - گشتاور خودتنظیمی 02:39
-
فصل 1 - مدلهای تایر 03:29
-
فصل 1 - مدلهای خطی 00:25
-
فصل 1 - مدلهای غیرخطی 00:30
-
فصل 1 - مدل Dugoff 04:12
-
فصل 1 - فرمول جادویی 02:45
-
مثال فرمول جادویی در متلب 07:33
-
مسائل مدلهای تایر None
-
مقدمه 01:12
-
فصل 2 - مدل خودرو 05:48
-
فصل 2 - مدل دوچرخه 18:14
-
فصل 2 - آشنایی با فضای حالت 13:43
-
گرم کردن فضای حالت None
-
فصل 2 - تحلیل پایداری 04:55
-
فصل 2 - ویژگیهای هندلینگ 06:30
-
تمرینات None
-
فصل 2 - نگاهی دیگر به هندلینگ 06:36
-
فصل 2 - اشتباهات رایج که باید اجتناب کرد 03:05
-
فصل 2 - تکلیف None
-
یک مدل جدید فضای حالت None
-
آشنایی با سیمولینک - بلوک زاویه لغزش 10:48
-
مدل دوچرخه با لاستیکهای فرمول جادویی None
-
فصل 3 - ماشینآلات کمرشکن 02:18
-
فصل 3 - مدل با یک درجه آزادی 06:06
-
فصل 3 - مدل با سه درجه آزادی 09:59
-
فصل 3 - تحلیل پایداری 04:22
-
فصل 3 - رفتار در حالت پایدار 04:33
-
فصل 3 - ناپایداریهای ماشینآلات کمرشکن 03:15
-
فصل 3 - تکلیف None
-
فصل 4 - هدایت خودروهای چهارچرخ 06:43
-
فصل 4 - هدایت خودروهای چهارچرخ - مدل خودرو 04:41
-
فصل 4 - هدایت خودروهای چهارچرخ - استراتژیها 11:19
-
فصل 4 - انتخابی از استراتژیهای کنترل 07:20
-
فصل 4 - مثالهای هدایت خودروهای چهارچرخ (اختیاری) 05:01
-
فصل 4 - تکلیف (اختیاری) None
-
فصل 4 - مثال شبیهسازی متلب (اختیاری) 24:58
-
فصل 5 - مرکز غلتش و محور غلتش 11:04
-
فصل 6 - مدلهای DOF بالاتر 04:23
-
فصل 6 - مدل 3DOF 11:06
-
تکلیف None
-
فصل 7 - راحتی سواری 09:21
-
فصل 7 - جهش بدنه 07:55
-
فصل 7 - پرش چرخ 02:14
-
فصل 7 - مدل یکچهارم خودرو 16:26
-
تمرین تولید فضای حالت None
-
فصل 7 - مشکل شبیهسازی یکچهارم خودرو 03:41
-
فصل 7 - شبیهسازی مدل یکچهارم خودرو در متلب 19:46
-
فصل 7 - تابع انتقال یکچهارم خودرو در متلب 06:07
-
فصل 7 - توابع انتقال 05:46
-
فصل 7 - نقاط ثابت (اختیاری) 02:48
-
فصل 7 - مدل نیم خودرو 09:48
-
فصل 7 - مدل 4DOF 01:49
-
تکلیف None
-
تمرین - مدل یکچهارم خودرو None
-
فصل 8 - تعلیقهای فعال 06:12
-
فصل 8 - مدل تعلیق فعال اولیه 02:47
-
فصل 8 - آشنایی با کنترل LQR 13:11
-
فصل 8 - مثال کنترل LQR 08:41
-
فصل 8 - مدل یکچهارم خودرو فعال 04:42
-
فصل 8 - مثال کنترل یکچهارم خودرو فعال 03:36
-
تکلیف None
مشخصات آموزش
دینامیک خودرو - مثالهای متلب و سیمولینک
- تاریخ به روز رسانی: 1404/06/14
- سطح دوره:متخصص
- تعداد درس:69
- مدت زمان :07:01:57
- حجم :2.55GB
- زبان:دوبله زبان فارسی
- دوره آموزشی:AI Academy
آموزش های مرتبط
- زمان: 06:20:27
- تعداد درس: 61
-
سطح دوره:
-
زبان: دوبله فارسی
- زمان: 08:37:22
- تعداد درس: 34
-
سطح دوره:
-
زبان: دوبله فارسی

- زمان: 08:48:53
- تعداد درس: 26
-
سطح دوره:
-
زبان: دوبله فارسی

-
سطح دوره:
-
زبان: دوبله فارسی

- زمان: 23:11:13
- تعداد درس: 161
-
سطح دوره:
-
زبان: دوبله فارسی

- زمان: 27:10:32
- تعداد درس: 203
-
سطح دوره:
-
زبان: دوبله فارسی
- زمان: 02:03:56
- تعداد درس: 26
-
سطح دوره:
-
زبان: دوبله فارسی

- زمان: 19:21:59
- تعداد درس: 121
-
سطح دوره:
-
زبان: دوبله فارسی
- زمان: 16:24:29
- تعداد درس: 101
-
سطح دوره:
-
زبان: دوبله فارسی